ELEMENTOS DE MÁQUINAS Y SISTEMAS
![]() Introducción
Introducción
![]() Transmisión movimiento rectilíneo en rectilíneo.
Transmisión movimiento rectilíneo en rectilíneo.
![]() Transmisión movimiento de rotación en rotación
Transmisión movimiento de rotación en rotación
![]()
Un mecanismo es un conjunto de elementos, normalmente rígidos, conectados entre sí por medio de articulaciones móviles y cuya misión es transformar una velocidad en otra velocidad, una fuerza en otra fuerza, una trayectoria en otra diferente o un tipo de energía en otro tipo distinto.
Un mecanismo debe cumplir las siguientes condiciones:
![]() Debe estar formado por elementos rígidos o semirrígidos,
eslabones o barras que pueden ser
simples (dos elementos de enlace con otros eslabones),
complejos (más de dos uniones con
otros eslabones).
Debe estar formado por elementos rígidos o semirrígidos,
eslabones o barras que pueden ser
simples (dos elementos de enlace con otros eslabones),
complejos (más de dos uniones con
otros eslabones).
![]() Uno de los eslabones bastidor debe
estar en reposo sin posibilidad de movimiento.
Uno de los eslabones bastidor debe
estar en reposo sin posibilidad de movimiento.
![]() Debe existir movimiento entre los eslabones. La unión entre dos eslabones que
permite un determinado movimiento se denomina par
cinemático.
Debe existir movimiento entre los eslabones. La unión entre dos eslabones que
permite un determinado movimiento se denomina par
cinemático.
El eslabón de entrada del mecanismo en el que se aplica la fuerza, movimiento, velocidad exterior se denomina impulsor o conductor, mientras que el de salida, donde se obtiene la fuerza, movimiento, velocidad ya modificadas, se denomina seguidor o conducido.
Un sistema mecánico o máquina es una combinación de mecanismos que transforma velocidades, trayectorias, fuerzas o energías mediante una serie de transformaciones intermedias.
Una máquina consta de los siguientes sistemas:
![]() Sistema motriz.- Transforma la energía de entrada en otro tipo de energía
de salida, para realizar un trabajo.
Sistema motriz.- Transforma la energía de entrada en otro tipo de energía
de salida, para realizar un trabajo.
![]() Sistema transmisor.- Modifica la energía o el movimiento proporcionado
por el sistema motriz para que pueda aplicarse al sistema receptor.
Sistema transmisor.- Modifica la energía o el movimiento proporcionado
por el sistema motriz para que pueda aplicarse al sistema receptor.
![]() Sistema receptor.- Realiza un trabajo con la salida que le proporciona el
sistema transmisor. Es el objetivo de todo sistema mecánico.
Sistema receptor.- Realiza un trabajo con la salida que le proporciona el
sistema transmisor. Es el objetivo de todo sistema mecánico.
![]() Sistema de sustentación.- Fija todos los elementos que componen la
máquina, se denomina bancada, bastidor o zócalo. Si hablamos de máquinas
móviles chasis.
Sistema de sustentación.- Fija todos los elementos que componen la
máquina, se denomina bancada, bastidor o zócalo. Si hablamos de máquinas
móviles chasis.
![]() Sistema de control.- Se encarga de que los movimientos y velocidades de
los elementos de la máquina sean los correctos.
Sistema de control.- Se encarga de que los movimientos y velocidades de
los elementos de la máquina sean los correctos.
![]() Otros sistemas, lubricación, refrigeración, frenado,...
Otros sistemas, lubricación, refrigeración, frenado,...
La clasificación de los mecanismos según el tipo de entrada y salida es:
![]() Movimientos rectilíneos en movimientos rectilíneos.- poleas, palancas,...
Movimientos rectilíneos en movimientos rectilíneos.- poleas, palancas,...
![]() Movimientos de rotación en otro de rotación.- ruedas y conos de fricción,
transmisión por correas, cables, cadenas, engranajes, leva-seguidor
oscilante,...
Movimientos de rotación en otro de rotación.- ruedas y conos de fricción,
transmisión por correas, cables, cadenas, engranajes, leva-seguidor
oscilante,...
![]() Movimientos de rotación en movimientos rectilíneos.- leva-seguidor lineal,
tornillo tuerca, piñon-cremallera,...
Movimientos de rotación en movimientos rectilíneos.- leva-seguidor lineal,
tornillo tuerca, piñon-cremallera,...
![]()
Mecanismos que transforman movimiento rectilíneo en otro rectilíneo
La aplicación fundamental de estos mecanismos es la transformación de fuerzas, de manera que la fuerza necesaria para realizar una determinada acción sea menor que la necesaria si no empleásemos este mecanismo. Los mecanismos más importantes son la palanca y la polea.
![]() Palanca.- Barra rígida,
eslabón, unida al bastidor por un punto llamado punto de apoyo o fulcro, que
hace posible que la barra gire. La fuerza que debemos vencer con la palanca es
la resistencia (R), mientras que la fuerza motriz aplicada es la fuerza o
potencia (F). La distancia entre la fuerza o potencia y el punto de apoyo es el
brazo de potencia bF y la distancia entre la resistencia y el punto
de apoyo es el brazo de resistencia bR.
Palanca.- Barra rígida,
eslabón, unida al bastidor por un punto llamado punto de apoyo o fulcro, que
hace posible que la barra gire. La fuerza que debemos vencer con la palanca es
la resistencia (R), mientras que la fuerza motriz aplicada es la fuerza o
potencia (F). La distancia entre la fuerza o potencia y el punto de apoyo es el
brazo de potencia bF y la distancia entre la resistencia y el punto
de apoyo es el brazo de resistencia bR.
Cuando una palanca está en equilibrio la suma de los momentos es cero: ΣMo = 0
El valor del momento de una fuerza respecto a un punto es igual al producto del valor de la fuerza por su mínima distancia al punto. Los momentos pueden ser positivos o negativos según el sentido en el que puedan generar el giro. Según esto y teniendo en cuanta que la suma de los momentos es cero nos queda:
F · bF = R · bR
Ley de la palanca
Según la posición de la fuerza, la resistencia y el punto de apoyo las palancas se pueden clasificar en:
 |
 |
 |
Al aumentar el brazo de potencia la fuerza necesaria para elevar una determinada resistencia disminuye. La potencia es directamente proporcional a la resistencia y al brazo de resistencia e inversamente proporcional al brazo de potencia.
Las palancas se emplean para:
![]() Transmitir movimientos.
Transmitir movimientos.
![]() Transformar un movimiento en otro de sentido contrario.
Transformar un movimiento en otro de sentido contrario.
![]() Transformar fuerzas grandes en fuerzas pequeñas.
Transformar fuerzas grandes en fuerzas pequeñas.
![]() Transformar fuerzas pequeñas en fuerzas grandes.
Transformar fuerzas pequeñas en fuerzas grandes.
![]() Transformar un movimiento pequeño en otro mayor.
Transformar un movimiento pequeño en otro mayor.
![]() Transformar un gran movimiento en uno pequeño.
Transformar un gran movimiento en uno pequeño.
![]() Polea.-
Rueda que puede girar alrededor de su eje y presenta una hendidura o
acanaladura por la que se hace pasar una cuerda, correa o cable. Pueden ser:
Polea.-
Rueda que puede girar alrededor de su eje y presenta una hendidura o
acanaladura por la que se hace pasar una cuerda, correa o cable. Pueden ser:
Fijas.- su eje de rotación permanece fijo
Móviles.- si su eje de rotación se puede desplazar de forma lineal, paralelamente a sí mismo.
 |
 |
| polea fija | polea móvil |
En ambos tipos de poleas si consideramos su masa despreciable y que no hay rozamiento en la rotación del eje, cuando están en equilibrio estático o dinámico, el momento total de las fuerzas debe ser nulo.
Polea fija.- En la polea fija no obtenemos ganancia mecánica, la fuerza que debemos ejercer es igual a la carga que debemos elevar, lo que nos permite esta polea es realizar la fuerza en la dirección adecuada. La potencia se desplaza la misma distancia que la carga, pero en diferente sentido.
La expresión que relaciona la fuerza o potencia y la resistencia se obtiene de la misma forma que en las poleas. Si la suma de momentos es cero, tendremos:
 |
|
Polea móvil.- En la polea móvil sí obtenemos ganancia mecánica, la fuerza que debemos ejercer es la mitad de la carga que debemos elevar.
 Imagen obtenida en mecaneso |
La polea móvil está colgada de dos tramos de cuerda; la resistencia (R) tira hacia abajo, mientras que la potencia (P) y la tensión (T) de la cuerda lo hacen hacia arriba. El peso o resistencia es soportado una parte por la potencia y otra por la tensión de la cuerda. En la polea móvil la resistencia queda anulada o compensada con las fuerzas de la potencia y la tensión, cumpliéndose que su suma vectorial es nula. Por tanto:
|
|
La carga y la polea solamente se desplazan la mitad del recorrido (L/2 metros) que realiza el extremo libre de la cuerda (L metros).
|
Imagen obtenida en mecaneso |
![]() Combinación
de poleas.-
La combinación de poleas fijas y móviles da lugar a mecanismos más complejos
denominados aparejos o polipastos. Entre ellos tenemos:
Combinación
de poleas.-
La combinación de poleas fijas y móviles da lugar a mecanismos más complejos
denominados aparejos o polipastos. Entre ellos tenemos:
Polipasto potencial- Está formado por una serie de poleas, la mitad fija y la otra mitad móviles. Por el canal de todas ellas, pasa una única cuerda.
  imagen obtenida en mecaneso |
La resistencia R (compuesto por la carga R, más el peso de las armaduras y el de las poleas, que suele despreciarse a efectos de cálculo en los problemas) está contrarrestado por las tensiones que aparecen en los diferentes tramos de cuerda que conectan las poleas fijas y las móviles, como puede verse en el esquema anterior. La fuerza que tenemos que hacer para elevar la carga es: Siendo n el número de poleas móviles del polipasto potencial:
|
Polipasto exponencial- Por
cada polea móvil pasa una cuerda diferente. Cada una de las cuerdas tiene un
punto fijo y el otro es móvil.
 |
En el polipasto exponencial se cumple:
En general siendo n el número de poleas móviles
|
![]()
Mecanismos que transforman movimiento de rotación en otro de rotación
Este tipo de mecanismo transformar movimientos de rotación en otro de rotación continua o alternativa, modificando la velocidad. Dentro de este grupo tenemos las ruedas o rodillos de fricción, los conos de fricción, sistema de transmisión por correo o por cable, transmisión por cadena, engranajes cilíndricos y cónicos.
 Transmisión por fricción.- Se
transmite el movimiento entre dos ejes gracias a la fuerza de rozamiento entre
dos ruedas. La distancia entre los ejes en este caso es pequeña. Se emplean
materiales con lato coeficiente de rozamiento alto para evitar que deslicen o
resbalen. Este tipo de transmisión tiene como ventaja que es muy fácil de
fabricar, apenas necesita mantenimiento y no produce ruidos, aunque el
inconveniente es que no puede transmitir grandes esfuerzos.
Transmisión por fricción.- Se
transmite el movimiento entre dos ejes gracias a la fuerza de rozamiento entre
dos ruedas. La distancia entre los ejes en este caso es pequeña. Se emplean
materiales con lato coeficiente de rozamiento alto para evitar que deslicen o
resbalen. Este tipo de transmisión tiene como ventaja que es muy fácil de
fabricar, apenas necesita mantenimiento y no produce ruidos, aunque el
inconveniente es que no puede transmitir grandes esfuerzos.
Ruedas de fricción exteriores.- Formadas por dos discos o ruedas en contacto por su periferia. este contacto se realiza por presión, de forma que la rueda conductora hace girar a la conducida. Los elementos que forman este sistema de transmisión son:
 |
Piñón o rueda conductora encargada de transmitir el movimiento. Se caracteriza por su diámetro en mm, el número de revoluciones (rpm) y velocidad tangencial (m/min Rueda conducida.- recibe el movimiento y viene caracterizada por los mismos parámetros que la anterior. Distancia entre ejes.- Suma de los radios de las ruedas.
|
|
 Cuando la relación de transmisión es: mayor que 1 el sistema es multiplicador menor que 1 el sistema es reductor igual a 1 se mantiene la velocidad |
Partiendo de la base de que no hay deslizamiento entre las ruedas, la velocidad tangencial de ambas ruedas es la misma:
La velocidad angular es el número de revoluciones por minuto en rad/s
La velocidad lineal es:
Como las velocidades tangenciales de ambas ruedas son iguales nos queda:
La relación de transmisión es el cociente entre la velocidad de la rueda conducida y la motriz o conductora, o bien la relación entre el diámetro de la motriz o conductora y la conducida:
|
|
Ambas ruedas giran en sentido contrario, si queremos que las ruedas giren en el mismo sentido debemos utilizar una rueda loca:

Ruedas de fricción interiores.- Formadas por dos discos o ruedas en contacto por su periferia. En este caso ambas ruedas giran en el mismo sentido.
|
|
La distancia entre ambos ejes en este
caso es la diferencia de los radios.
|
Ruedas de fricción troncocónicas.- Se caracterizan porque sirven para transmitir el movimiento entre ejes cuyas prolongaciones se cortan. Tienen la forma de tronco de cono, tal y como se muestra en la figura. En cualquier punto de contacto de ambas ruedas, su velocidad tangencial es idéntica, manteniéndose las mismas ecuaciones de la relación de transmisión anteriores.
|
|
La relación de transmisión es: BA = PA · cosb TA = PA · senb TA = r y BA = R por tanto: r = PA · senb y R = PA · cosb Dividimos entre sí ambas expresiones:
Si los ejes no son perpendiculares nos quedaría: BA = PA · sena TA = PA · senb
a = g - b
|
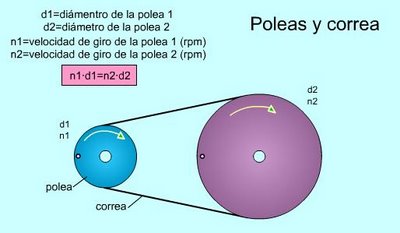
Poleas y correas.- Se denomina polea a la rueda que se utiliza en las transmisiones por medio de correa, y correa a la cinta o cuerda flexible unida a sus extremos que sirve para transmitir el movimiento de giro entre una rueda y otra. Una transmisión por correa consta, al menos, de dos poleas y una correa. Este tipo de transmisión se emplea más que las ruedas, ya que tiene una mayor superficie de fricción, puede transmitir mayores esfuerzos y entre ejes más alejados. Para que el rendimiento sea óptimo, las correas deben estar tensadas adecuadamente, ejerciendo la fuerza axial adecuada.
|
|
|
Transmisión por
engranajes.- Se conoce como engranaje al conjunto de dos o más
ruedas dentadas que tienen en contacto sus dientes, de forma que, cuando gira
una, giran las demás.
 Es el medio de transmisión de potencia más empleado. Tienen la ventaja de que
las ruedas no pueden resbalar una con respecto a la otra, consiguiendo dos
cosas:
Es el medio de transmisión de potencia más empleado. Tienen la ventaja de que
las ruedas no pueden resbalar una con respecto a la otra, consiguiendo dos
cosas:
![]() Transmitir grandes esfuerzos
Transmitir grandes esfuerzos
![]() Conservar la relación de transmisión siempre constante.
Conservar la relación de transmisión siempre constante.
Se emplean cuando hay que transmitir grandes esfuerzos o se desea que la
relación
de
transmisión se mantenga siempre constante. Consta de dos ruedas a las que se les
han tallado una serie de dientes. Al igual que ocurría con las ruedas de
fricción, al engranaje conductor se le conoce con el nombre de piñón y al
conducido como rueda.
Un par de engranajes, a efectos
teóricos y de cálculo, se pueden considerar como dos ruedas de fricción
exteriores cuyos diámetros coinciden con los primitivos de los engranajes.
Los engranajes se pueden usar para
transmitir el movimiento entre árboles: paralelos, perpendiculares y árboles que
se cruzan.
Normalmente, el tallado de los dientes se hace sobre la superficie exterior. Cuando uno de ellos está tallado por su parte interna, al conjunto de ruedas se le denomina engranajes interiores. Los dientes de las ruedas pueden ser dientes rectos, dientes helicoidales y dientes en V.
![]() Engranajes
de dientes rectos. Son fáciles de fabricar, pero tienen el inconveniente de ser
muy ruidosos y producir vibraciones. Se emplean cuando la potencia que se va a
transmitir y el número de revoluciones con que giran no es muy grande. Las
características de los engranajes de dientes rectos son:
Engranajes
de dientes rectos. Son fáciles de fabricar, pero tienen el inconveniente de ser
muy ruidosos y producir vibraciones. Se emplean cuando la potencia que se va a
transmitir y el número de revoluciones con que giran no es muy grande. Las
características de los engranajes de dientes rectos son:
![]() Tipo
de circunferencia:
Tipo
de circunferencia:
![]() Circunferencia primitiva. De radio Rp para la rueda y rp para el piñón, coincide
con la circunferencia de las ruedas de fricción. La transmisión del movimiento
se realiza entre ambas circunferencias.
Circunferencia primitiva. De radio Rp para la rueda y rp para el piñón, coincide
con la circunferencia de las ruedas de fricción. La transmisión del movimiento
se realiza entre ambas circunferencias.
![]() Circunferencia interior. Limita los dientes por la parte interior. Se representa
mediante Ri para la rueda y ri para el piñón.
Circunferencia interior. Limita los dientes por la parte interior. Se representa
mediante Ri para la rueda y ri para el piñón.
![]() Circunferencia exterior. Limita los dientes por la parte externa. Se indica
mediante Re para la rueda y re para el piñón.
Circunferencia exterior. Limita los dientes por la parte externa. Se indica
mediante Re para la rueda y re para el piñón.
![]() Paso (p): Es la distancia entre los centros de dos dientes consecutivos medida
sobre la
Paso (p): Es la distancia entre los centros de dos dientes consecutivos medida
sobre la
circunferencia primitiva. Para que dos engranajes puedan engranar correctamente
es necesario que ambos tengan el mismo paso. Para poder fabricar engranajes y
facilitar su sustitución, se normalizan los valores del paso de las ruedas que
se fabrican.
![]() Módulo (m). Es un valor característico de las ruedas dentadas que se expresa en
milímetros y que define el diámetro primitivo normalizado. Para que dos
engranajes puedan engranar tienen que tener el mismo módulo.
Módulo (m). Es un valor característico de las ruedas dentadas que se expresa en
milímetros y que define el diámetro primitivo normalizado. Para que dos
engranajes puedan engranar tienen que tener el mismo módulo.
p
= π · m
![]() Paso.- Valor del arco correspondiente a la circunferencia primitiva que abarca
un grueso y un diente del diente.
Paso.- Valor del arco correspondiente a la circunferencia primitiva que abarca
un grueso y un diente del diente.

Longitud de la circunferencia primitiva de la rueda = 2 · p · r = p · Dp = p · Zr
Longitud de la circunferencia primitiva de la rueda = 2 · p · r = p · Dp = p · Zp
Dividiendo miembro a miembro tenemos:

Si lo relacionamos con las ruedas de fricción nos queda:

![]() Características del diente.-
Características del diente.-
![]() Cabeza del diente ha= cabeza del diente = altura de adendum = 1 · m
Cabeza del diente ha= cabeza del diente = altura de adendum = 1 · m
![]() Pie del diente hb= altura de dedendum = 1,25 · m
Pie del diente hb= altura de dedendum = 1,25 · m
![]() Altura del diente h = ha + hb = 1 · m + 1,25 · m = 2,25 ·
m
Altura del diente h = ha + hb = 1 · m + 1,25 · m = 2,25 ·
m
![]() Longitud del diente b = 10 · m
Longitud del diente b = 10 · m
![]() Grueso del diente s = 19/40 · p
Grueso del diente s = 19/40 · p
![]() Hueco del diente s = 21/40 · p
Hueco del diente s = 21/40 · p
![]() p = s + w
p = s + w
![]() Valor de los diámetros:
Valor de los diámetros:
![]() Diámetro primitivo:
Diámetro primitivo:
Dp = m · Zr
![]() Diámetro exterior:
Diámetro exterior:
De =Dp + 2 · ha = Dp + 2 · m = m · Z + 2 · m = m · (Z + 2)
![]() Diámetro interior:
Diámetro interior:
Di =Dp - 2 · hb = Dp - 2 · 1,25 · m = m · Z - 2,5 · m = m · (Z - 2,5)
 |
Dientes helicoidales.- en este tipo de engranaje varios dientes están engranados a la vez. esto permite que el esfuerzo de flexión se reparta entre ellos durante la transmisión disminuyendo la posibilidad de rotura de los dientes. También disminuye el ruido durante el funcionamiento. El inconveniente es que al estar inclinados los dientes se produce una fuerza axial sobre los cojinetes de apoyo del eje |
 |
Dientes en V.- Conservan la ventaja de los anteriores con un diseño en V que contrarresta las fuerzas axiales. Generalmente se forman uniendo dos engranajes de dientes helicoidales, cuyos dientes forman un ángulo complementario. |